


Como realizar una inspección automatizada de tubería submarina mediante visión artificial?
Dirigido a: Empresas Participantes, Alianzas Interinstitucionales, Centros de Desarrollo Tecnológico y/o Productivo. , Instituciones de Educación Superior.
Premios disponibles: $ 45,000,000
Fecha apertura: 01 de agosto de 2019
Fecha cierre: 30 de septiembre de 2019
Resultados definitivos: 10 de diciembre de 2019
Dirigido a: Empresas Participantes, Alianzas Interinstitucionales, Centros de Desarrollo Tecnológico y/o Productivo. , Instituciones de Educación Superior.
Premios disponibles: $ 45,000,000
Fecha apertura: 01 de agosto de 2019
Fecha cierre: 30 de septiembre de 2019
Resultados definitivos: 10 de diciembre de 2019
Antecedentes
Un ROV (Remote Operated Vehicle) es un robot submarino no tripulado y conectado a una unidad de control y potencia en la superficie por medio de un cable umbilical [1]. Así, a través del cable umbilical se envía información en ambas direcciones para controlar el movimiento y realizar actividades de monitoreo mediante instrumentos instalados en el equipo (ver figura 1). Un ROV está compuesto en general por un vehículo, enlazado a una estación de control y operado en superficie por medio de una línea umbilical, un sistema para controlar la dinámica del tendido del cable, un sistema de despliegue, y una fuente de alimentación de energía [2].
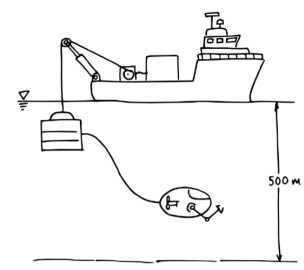
Figura 1: Diagrama general de un ROV.
Uno de los campos de acción que incluye los ROV es la inspección y mantenimiento de tubería submarina, buques petroleros, infraestructura, facilidades y plataformas offshore mediante un sistema de visión artificial [3].
Un ROV de inspección está diseñado para realizar tareas de monitoreo mientras navega. Una misión de inspección puede consistir en adquirir imágenes con una o varias cámaras, para la revisión de instalaciones submarinas como estructuras metálicas, tuberías, cables, equipos y plataformas, etc. La tecnología de captura de video e imágenes se encuentra muy desarrollada, esto permite la obtención de imágenes con alta resolución, colores definidos y el procesamiento en tres dimensiones. Sin embargo, a partir de cierta distancia, que dependerá del grado de turbidez del agua, los objetos submarinos son difícilmente distinguibles [4]. Es por esto, que algunos trabajos de investigación se han enfocado en el desarrollo de algoritmos que pueden ser integrados al sistema de visión artificial con el propósito de mejorar su funcionalidad.
Considerando el potencial de los ROV, Ecopetrol tiene como objetivo fortalecer la capacidad de innovación y desarrollo tecnológico en temas relacionados con robótica submarina en el marco del "Programa estratégico para el desarrollo de la tecnología robótica orientada a la exploración petrolera de los fondos marinos colombianos".
El presente desafío contempla como reto el desarrollo e implementación de un sistema para inspección en línea de facilidades submarinas mediante visión artificial como apoyo al proceso de monitoreo de integridad de infraestructura submarina. El sistema de inspección debe tener la capacidad de operación en línea, detección, clasificación y localización del área o zona bajo inspección e identificación de posibles anomalías como pérdida de material, corrosión o grietas. En la figura 2 se ilustra un ejemplo para el caso de inspección de tuberías subacuáticas.

a.) Detección y clasificación del área bajo inspección.
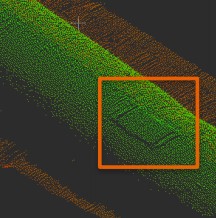
b.) Identificación de anomalía
Figura 2: Inspección de tubería submarina mediante sistema de visión artificial [5].
Referencias
[1] Wang, Wei, and Christopher M. Clark. "Modeling and simulation of the VideoRay Pro III underwater vehicle." OCEANS 2006-Asia Pacific. IEEE, 2007.
[2] Madero, D., and J. J. Durán. "Diseño de un Prototipo ROV (remotely operated vehicle) subacuático experimental." Trabajo de grado, Escuela de Ingeniería Mecánica, Universidad Industrial de Santander, Tech. Rep 75 (2012).
[3] Manjunatha, M., Selvakumar, A. A., Godeswar, V. P., & Manimaran, R. (2018). A Low Cost Underwater Robot with Grippers for Visual Inspection of External Pipeline Surface. Procedia computer science, 133, 108-115.
[4] Moreno, H. A., Saltarén, R., Puglisi, L., Carrera, I., Cárdenas, P., & Álvarez, C. (2014). Robótica submarina: Conceptos, elementos, modelado y control. Revista Iberoamericana de Automática e Informática industrial, 11(1), 3-19.
[5] Braathen, N. F., & Sandford, A. J. (1986). Pipeline inspection by ROV. In Submersible Technology (pp. 313-318). Springer, Dordrecht.
Objetivos y Meta
En el presente desafío, los participantes deberán desarrollar un Prototipo TRL-3 de sistema de visión artificial para inspección de tuberias submarinas. Realizar la inspección en línea de la tubería, demarcar la zona o área de la tubería bajo inspección mediante un recuadro o segmentación de área, identificar posibles anomalías como corrosión, pérdida de material o fisuras y permitir el monitoreo en línea en superficie de los resultados de visión artificial.
El desarrollo del sistema debe incluir el etiquetado manual o automático de las fotografías de luz visible, preprocesamiento, programación del modelo para visión artificial, entrenamiento del modelo para visión artificial, evaluación, sintonía de parámetros e inferencia.
Alcance y Cobertura
Un sistema de visión artificial facilita la inspección en línea de los equipos y facilidades submarinas, mejorando la identificación, clasificación y localización de características de interés asociadas al objeto de estudio, que corresponde a un tramo de tubería subacuática.
El alcance del desafío comprende las siguientes actividades:
- i. Desarrollo de un algoritmo de visión artificial para procesamiento de video que permita la clasificación y localización de tubería subacuática mediante la respectiva demarcación sobre el video.
- ii. Desarrollo de un algoritmo de visión artificial para procesamiento de video que permita la clasificación y localización de anomalías como corrosión, pérdida de material o agrietamiento en la tubería subacuática sometida a inspección.
- iii. Entrenamiento y realización de pruebas de validación de los modelos y algoritmos de visión artificial desarrollados utilizando video y fotografías capturadas con cámara subacuática de una sección de tubería conocida sumergida en piscina.
- iv. Realización de pruebas de funcionalidad y desempeño en ambiente subacuático de los algoritmos de visión artificial durante la inspección con cámara subacuática de una sección de tubería de prueba sumergida en piscina. Las secciones de tubería pueden contener anomalías (corrosión, grietas, pérdida de material, etc) localizadas en posiciones no definidas previamente.
El desarrollo, etiquetado, entrenamiento, validación y pruebas de los modelos y algoritmos que conforman el sistema de visión artificial contempla la realización de las siguientes actividades:
- Construcción de base de datos de video y fotografías, y definición de las clases y/o etiquetas para la generación de los modelos de clasificación y localización. Se deberá seleccionar una metodología para la asignación de las clases en las imágenes de la base de datos construida. Además, la metodología de etiquetado, así como la exactitud de las etiquetas será considerada en la valoración final.
- Definición e implementación del preprocesamiento necesario sobre el video y fotografías para ingreso a la etapa de clasificación y localización del sistema de visión artificial. Los participantes podrán emplear diferentes técnicas de procesamiento a las imágenes como: ajuste de tamaño de las imágenes, recortes, rotaciones, ingeniería de características u otra metodología que propongan.
- Entrenamiento de los modelos propuestos para la clasificación y localización. En este, los participantes tendrán libertad de elegir la arquitectura y parámetros de los modelos, así como la metodología de selección del mismo.
- Una vez desarrollado el sistema de visión artificial, este será sometido a prueba con un segmento de tubería subacuática desconocida para los participantes, con el cual será calculada la métrica de exactitud en la clasificación y localización.
- Los integrantes podrán utilizar modelos genéricos pre-entrenados para mejorar el rendimiento de las etapas de clasificación y localización del Prototipo de sistema de visión artificial desarrollado.
- Los algoritmos de entrenamiento serán diseñados en el lenguaje de alto nivel Python y podrán utilizar cualquier framework de código abierto (por ejemplo, Keras, Theano, Caffe, CNTK, TF, Open CV, entre otras).
- El Prototipo de sistema de visión artificial para inspección debe contar como mínimo con una cámara de video subacuática de bajo costo y un computador.
- El concurso cofinancia la compra de materiales hasta por US $ 100.
- El concurso suministrará la tubería para entrenamiento, validación y pruebas de los modelos y algoritmos del Prototipo de visión artificial a desarrollar.
- El concurso facilitará el acceso a la piscina o estanque para el desarrollo de los Prototipos del desafío. Tecnoparque del SENA facilitará las instalaciones y asesoría para el desarrollo de los Prototipos de visión artificial.